1.3 目標(biāo)飛行的雷達(dá)坐標(biāo)
在雷達(dá)應(yīng)用中,測定目標(biāo)坐標(biāo)常用極(球)坐標(biāo)系統(tǒng)���,空間任一目標(biāo)的位置可用斜距D���,方位角β,高低角θ來表示�。在1.2節(jié)中為了簡化,算出的都是單位時間增量△t內(nèi)的坐標(biāo)增量�,但是在實際運算中,應(yīng)該使用實時坐標(biāo)值����。假設(shè)目標(biāo)在直角坐標(biāo)系中的位置為(xt,yt,
zt)��,則有:
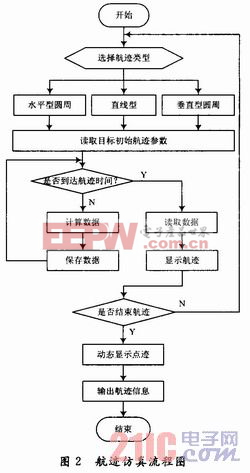
2 仿真流程
航跡仿真流程如圖2所示�����。






評論