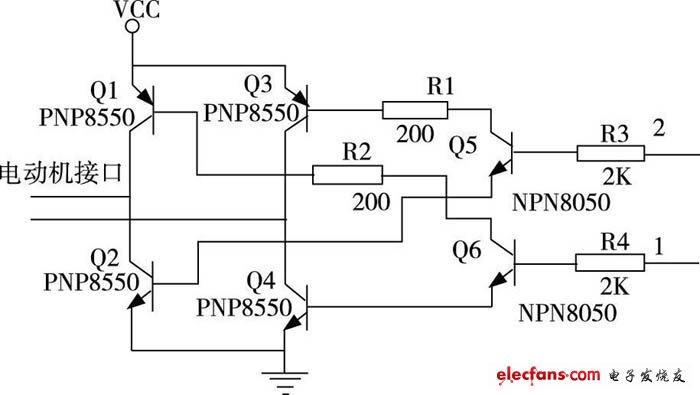
智能小車驅(qū)動(dòng)電路是一個(gè)全橋驅(qū)動(dòng)電路, Q1,Q2, Q3, Q4四個(gè)三極管組成4個(gè)橋臂�����, Q5 控制Q2和Q3的導(dǎo)通和關(guān)斷�, Q6控制Q1 和Q4 的導(dǎo)通和關(guān)斷, 驅(qū)動(dòng)電路分別用于后輪動(dòng)力驅(qū)動(dòng)電路和前輪方向驅(qū)動(dòng)電路����。當(dāng)1管腳為高電平, 2管腳為低電平時(shí)時(shí)Q1 和Q4 導(dǎo)通�, Q2和Q3截止, 電動(dòng)機(jī)帶動(dòng)車輪運(yùn)轉(zhuǎn); 當(dāng)1管腳為低電平���, 2管腳為高電平時(shí)時(shí)Q1和Q4截止��, Q2和Q3導(dǎo)通���, 電動(dòng)機(jī)帶動(dòng)車輪反向運(yùn)轉(zhuǎn)。




評(píng)論